




浮球液位控制器厂家指导如何进行仪表精确安装
发表时间:2018-05-03 11:13:04 点击次数:1680 技术支持:150-5269-2011
本文概述:
浮球液位控制器是一种在工业现场非常常见的液位控装置,可以适用于各种容器,各种介质的液体控制,当液位到达上、下切换值时,控制器触点发出通断开关式信号。 浮球液位计产品系列分防爆或非防爆两大类,防爆型能用于易燃和易爆介质为1.2级及A、B、C组承压容器的液位控制。 控制器不适用于对黄铜、不锈钢等材料有较强腐蚀作用以及含有导磁杂质的介质。
浮球液位控制器可以根据现场需求设定上、下位控制或报警,通过物理学和力学原理, 运用参照物的方法计算出在盛油或其他介质的容器上安装液位控制器及理想状态下(4℃纯水)安装的偏差值, 从而大大减小了旧方法在安装浮球液位控制器时所产生的误差。
一、问题提出
浮球式液位控制器是在电厂中应用较为广泛的一种检测液体的限位报警器, 它是利用液体浮力原理, 当浮球因浮力作用而上下运动时, 接线盒内的磁簧开关受到臂端拉杆影响而进行“ NC” (常闭)接点与“ NO” (常开)接点之互换, 从而输出液位高低的开关量信号, 然后再带动其他连锁动作。由于其具有良好的测量控制效果, 故而火力发电厂常运用它来控制一些敞开或承压容器内的水、油等介质的液位。一般情况下, 大多数安装方法均是按理想状态(4℃时纯水)进行安装, 从而忽略了虽然液面高度相同, 但不同介质密度的不同对控制器内浮球产生的浮力大小不同这一点, 也就使得报警值产生了误差。
当液面高度相同时, 根据公式F=ρgV, 其中ρ为介质密度, g为重力加速度, V为容器内介质的体积。由此可得知, 当介质密度*大时, 浮力F就*大(物理学上通常假设温度在4℃时纯水的密度**), 反之就*小。如图1所示, 两个相同容器的液位控制器装在同一个高度。装有4℃时纯水的容器达到报警位置H (假设H为由介质工况而设定的报警高度)发出报警信号时, 而装有油或其他介质的容器却没有报警, 但是容器内的液面高度确实已经达到报警线了。
二、解决方法
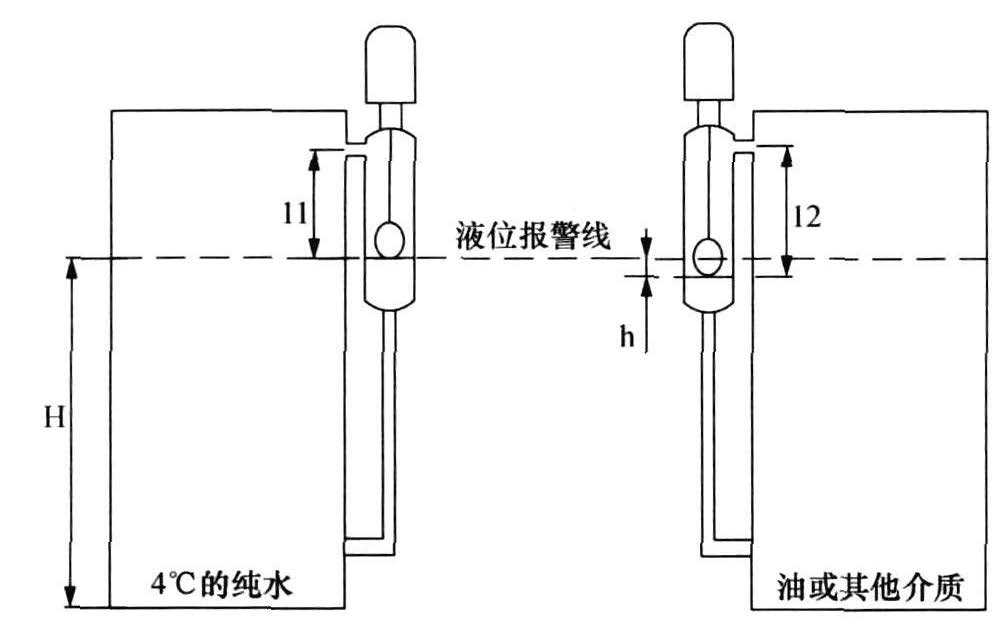
产生图1中现象的原因是什么呢? 原因就是因为由于介质密度的不同, 造成浮球浸入介质中的高度h不同。图1中, 安装在纯水容器上的液位控制器的浮球由于受浮力的作用推动连杆达到l1的距离, 触动开关产生了报警, 而装在盛油或其他介质容器上的液位控制器的浮球由于液体介质密度小而浸入介质中一定的高度h, 还没能达到带动连杆报警的位置。只有当盛有油或其他介质的容器中液面再升高h时, 液位控制器才报警, 显然, 此时液体已经高出盛水容器中液体的高度了。因此, 虽然两个容器液面高度相同, 但因为受介质密度的影响, 获得的结果是不同的。在安装液位控制器时, 如果不考虑所测介质的密度势必造成报警信号值产生误差h。如何避免这个误差, 使得液面高度一样时, 两个液位控制器同时报警呢?
如图2所示:
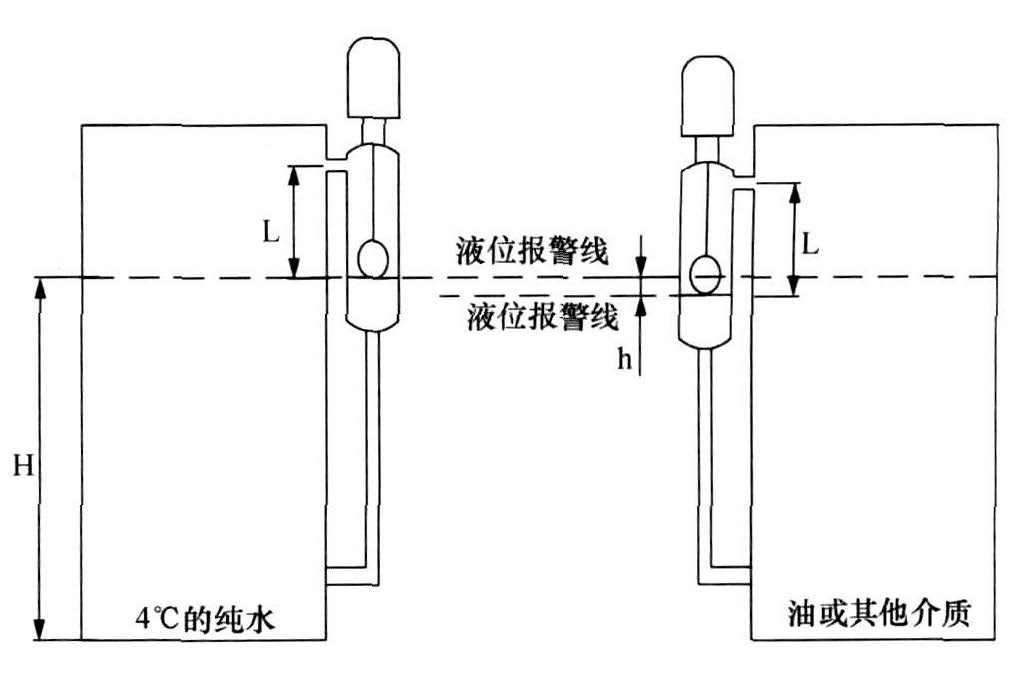
图2中, 将装在油或其他介质容器上的液位控制器向下调整h高度后, 我们就可以获得两种不同的介质在液面达到同一高度时同时报警的效果了。
由以上两图可以得出, 产生误差值h的主要原因就是因为两种介质具有不同的密度, 如果想获得**的报警信号, 就须克服这个误差, 但是如何获得h这个误差值呢? 仍按图1中的安装方法安装, 我们可以想象一下, 当两个容器的浮球达到报警位置的瞬间, 假设此时两个容器内的介质密度分别为ρ1和ρ2, 两个浮球受力分别是F1、F2 , 液面高度分别为H1 、H2 。
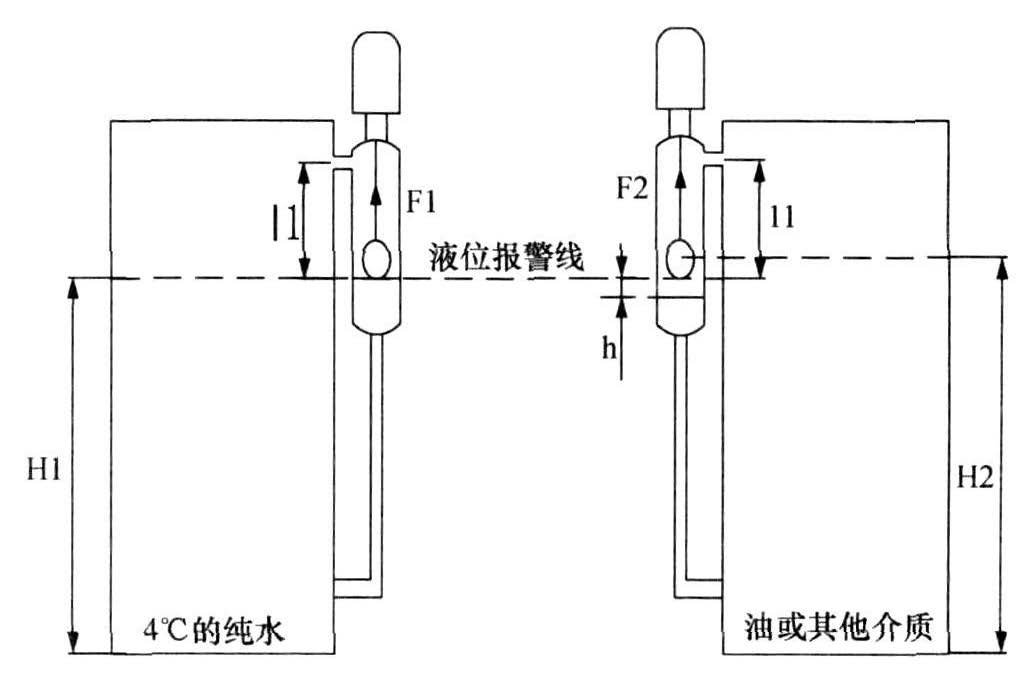
根据力学原理,报警瞬间两个浮球受到两种介质给予的浮力是相同的,即F1=F2(如图3所示)。根据公式:盛水容器液位控制器浮球受浮力F1=ρ1 gV1盛油或其他介质控制器浮球受浮力F2 =ρ2 gV2即:ρ1 gV1 =ρ2 gV2获得:ρ1×容器底面积×H1 =ρ2×容器底面积×H2又因为:H2 =H1 +h, 代入上式得:h= (ρ1×H1 -ρ2×H1 ) /ρ2
(1)
根据介质比重的两个定义:介质比重∫ =介质重量G/介质体积V和介质密度与4℃纯水密度之比, 介质重量G=介质密度ρ×g×V, 计算得出:ρ2 /ρ1 =ρ2 ×g, 即得出:ρ1 =1 /g, 代入式(1), 从而获得:h= (H1 /g-ρ2×H1 ) /ρ2
(2)
由式(2)我们可以看出, g为一个常数, H1 为给定的介质工况设定值, 我们只要知道所测介质的密度ρ2就可以求出误差值h。
得出h后, 我们在安装液位控制器时, 只要将控制器上的上升限、下降限触发线对准比工况设定值低h的地方, 即可避免误差值h。当然, 测量误差是不能绝对避免的, 我们所用到的参照物——— 4℃时的纯水也是理想状态下密度**, 但实际上浮球也会少许浸入其中, 上述方法只是大大减小了测量误差。
三、总结
质量是百年大计。在河南**火电建设公司以往工程项目部热控采用此方法安装液位控制器后, 使其测量的准确度一直保持在较高的水平, 保证了机组安全稳定运行, 减少了机组由于报警信号测量不准而发生误动的次数, 使公司热控施工处获得了良好的质量信誉。
一、问题提出
浮球式液位控制器是在电厂中应用较为广泛的一种检测液体的限位报警器, 它是利用液体浮力原理, 当浮球因浮力作用而上下运动时, 接线盒内的磁簧开关受到臂端拉杆影响而进行“ NC” (常闭)接点与“ NO” (常开)接点之互换, 从而输出液位高低的开关量信号, 然后再带动其他连锁动作。由于其具有良好的测量控制效果, 故而火力发电厂常运用它来控制一些敞开或承压容器内的水、油等介质的液位。一般情况下, 大多数安装方法均是按理想状态(4℃时纯水)进行安装, 从而忽略了虽然液面高度相同, 但不同介质密度的不同对控制器内浮球产生的浮力大小不同这一点, 也就使得报警值产生了误差。
当液面高度相同时, 根据公式F=ρgV, 其中ρ为介质密度, g为重力加速度, V为容器内介质的体积。由此可得知, 当介质密度*大时, 浮力F就*大(物理学上通常假设温度在4℃时纯水的密度**), 反之就*小。如图1所示, 两个相同容器的液位控制器装在同一个高度。装有4℃时纯水的容器达到报警位置H (假设H为由介质工况而设定的报警高度)发出报警信号时, 而装有油或其他介质的容器却没有报警, 但是容器内的液面高度确实已经达到报警线了。
二、解决方法
产生图1中现象的原因是什么呢? 原因就是因为由于介质密度的不同, 造成浮球浸入介质中的高度h不同。图1中, 安装在纯水容器上的液位控制器的浮球由于受浮力的作用推动连杆达到l1的距离, 触动开关产生了报警, 而装在盛油或其他介质容器上的液位控制器的浮球由于液体介质密度小而浸入介质中一定的高度h, 还没能达到带动连杆报警的位置。只有当盛有油或其他介质的容器中液面再升高h时, 液位控制器才报警, 显然, 此时液体已经高出盛水容器中液体的高度了。因此, 虽然两个容器液面高度相同, 但因为受介质密度的影响, 获得的结果是不同的。在安装液位控制器时, 如果不考虑所测介质的密度势必造成报警信号值产生误差h。如何避免这个误差, 使得液面高度一样时, 两个液位控制器同时报警呢?
如图2所示:
图2中, 将装在油或其他介质容器上的液位控制器向下调整h高度后, 我们就可以获得两种不同的介质在液面达到同一高度时同时报警的效果了。
由以上两图可以得出, 产生误差值h的主要原因就是因为两种介质具有不同的密度, 如果想获得**的报警信号, 就须克服这个误差, 但是如何获得h这个误差值呢? 仍按图1中的安装方法安装, 我们可以想象一下, 当两个容器的浮球达到报警位置的瞬间, 假设此时两个容器内的介质密度分别为ρ1和ρ2, 两个浮球受力分别是F1、F2 , 液面高度分别为H1 、H2 。
根据力学原理,报警瞬间两个浮球受到两种介质给予的浮力是相同的,即F1=F2(如图3所示)。根据公式:盛水容器液位控制器浮球受浮力F1=ρ1 gV1盛油或其他介质控制器浮球受浮力F2 =ρ2 gV2即:ρ1 gV1 =ρ2 gV2获得:ρ1×容器底面积×H1 =ρ2×容器底面积×H2又因为:H2 =H1 +h, 代入上式得:h= (ρ1×H1 -ρ2×H1 ) /ρ2
(1)
根据介质比重的两个定义:介质比重∫ =介质重量G/介质体积V和介质密度与4℃纯水密度之比, 介质重量G=介质密度ρ×g×V, 计算得出:ρ2 /ρ1 =ρ2 ×g, 即得出:ρ1 =1 /g, 代入式(1), 从而获得:h= (H1 /g-ρ2×H1 ) /ρ2
(2)
由式(2)我们可以看出, g为一个常数, H1 为给定的介质工况设定值, 我们只要知道所测介质的密度ρ2就可以求出误差值h。
得出h后, 我们在安装液位控制器时, 只要将控制器上的上升限、下降限触发线对准比工况设定值低h的地方, 即可避免误差值h。当然, 测量误差是不能绝对避免的, 我们所用到的参照物——— 4℃时的纯水也是理想状态下密度**, 但实际上浮球也会少许浸入其中, 上述方法只是大大减小了测量误差。
三、总结
质量是百年大计。在河南**火电建设公司以往工程项目部热控采用此方法安装液位控制器后, 使其测量的准确度一直保持在较高的水平, 保证了机组安全稳定运行, 减少了机组由于报警信号测量不准而发生误动的次数, 使公司热控施工处获得了良好的质量信誉。
返回顶部